Chapter 8.8 - exit.c 程序
Created by : Mr Dk.
2019 / 08 / 20 17:43
Ningbo, Zhejiang, China
8.8 exit.c 程序
8.8.1 功能描述
主要实现进程终止和退出的相关处理事宜。
8.8.2 代码注释
release() 函数
在 sys_kill() 和 sys_waitpid() 系统调用中被调用,释放进程占用的任务数组项,以及 TSS 占用的内存页面:
- 扫描任务数组指针表
- 如果找到,清空任务槽,释放任务数据结构占用的内存页面
- 执行调度函数,在返回时立刻退出
如果表中没有找到指定任务对应的项,则内核 panic,将任务 p 从进程双向链表中删除:
void release(struct task_struct * p)
{
int i;
if (!p)
// 任务指针为 NULL
return;
if (p == current) {
printk("task releasing itself\n\r");
return;
}
for (i = 1; i < NR_TASKS; i++)
if (task[i] == p) {
task[i] = NULL;
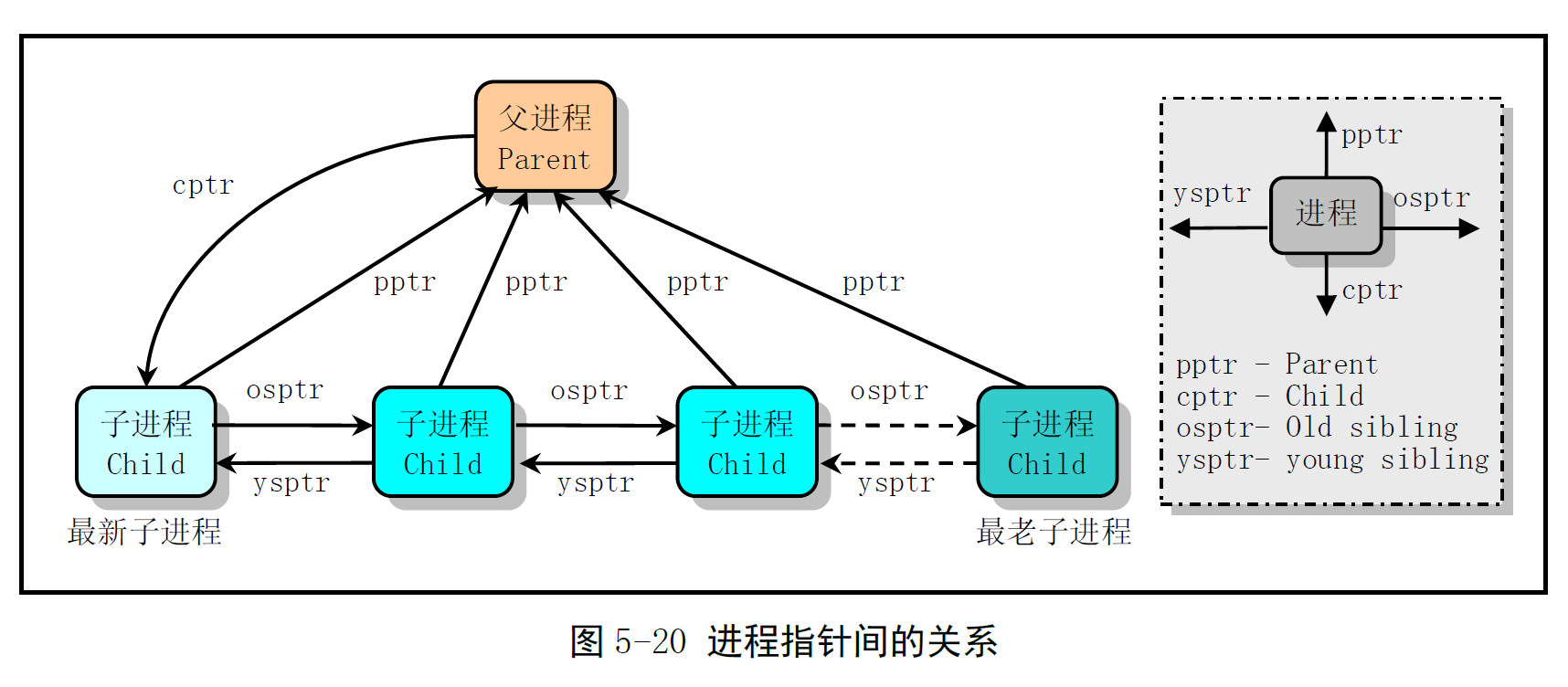
// 更新进程链表的链接
// 将任务 p 从双向链表中删除
if (p->p_osptr)
// 不是最老子进程
p->p_osptr->p_ysptr = p->p_ysptr;
if (p->p_ysptr)
// 不是最新子进程
p->p_ysptr->p_osptr = p->p_osptr;
else
// 最新子进程需要设置父进程指针
p->p_pptr->p_cptr = p->p_osptr;
free_page((long) p);
schedule();
return;
}
panic("trying to release non-existent task");
}
检查进程树 - 调试函数
下面的部分是条件编译的,仅在调试时使用。因为这个函数很慢:
- 验证 p_ysptr 和 p_osptr 构成的双向链表
- 检查 p_cptr 和 p_pptr 构成的进程树
逻辑有些无聊,我不乐意写。
send_sig() - 向任务发送信号
首先判断参数的正确性。判断条件是否能够满足 - 是否有发送信号的权利。如果满足条件,就向指定的进程发送信号。
static inline int send_sig(long sig, struct task_struct *p, int priv)
{
if (!p)
return -EINVAL;
// 没有权限 && 当前进程的有效用户 ID 和 p 不同 && 不是超级用户
// suser() - (current->euid == 0)
if (!priv && (current->euid != p->euid) && !suser())
return -EPERM;
// 如果发送的信号是 SIGKILL 或 SIGCONT
// 如果此时 p 处于停止状态,就置其为就绪状态
// 修改进程的信号 bitmap,去掉会导致进程停止的信号
// -- SIGSTOP, SIGTSTP, SIGTTIN, SIGTTOU
if ((sig == SIGKILL) || (sig == SIGCONT)) {
if (p->state == TASK_STOPPED)
p->state = TASK_RUNNING;
p->exit_code = 0;
p->signal &= ~( (1 << (SIGSTOP-1)) | (1 << (SIGTSTP-1)) |
(1 << (SIGTTIN-1)) | (1 << (SIGTTOU-1)));
}
// 发送的信号被进程忽略,因此不需要发送信号
if ((int) p->sigaction[sig-1].sa_handler == 1)
return 0;
// 如果信号是 SIGSTOP、SIGTSTP、SIGTTIN、SIGTTOU 之一
// 就要让接收信号的进程停止运行
// 因此还要复位让进程继续运行的信号 - SIGCONT
if ((sig >= SIGSTOP) && (sig <= SIGTTOU))
p->signal &= ~(1 << (SIGCONT-1));
// 发送信号
p->signal |= (1<<(sig-1));
return 0;
}
session_of_pgrp() - 根据进程组号取得进程所属会话号
int session_of_pgrp(int pgrp)
{
struct task_struct **p;
for (p = &LAST_TASK; p > &FIRST_TASK; --p)
if ((*p)->pgrp == pgrp)
return ((*p)->session);
return -1;
}
kill_pg() - 向进程组发送信号
有意思的是,Linux 里面的 kill 实际上是向进程或进程组发送信号,而不是杀死进程的意思。只是其中有一个信号可以杀死进程。
int kill_pg(int pgrp, int sig, int priv)
{
struct task_struct **p;
int err, retval = -ESRCH;
int found = 0;
if (sig < 1 || sig > 32 || pgrp <= 0)
return -EINVAL;
for (p = &LAST_TASK; p > &FIRST_TASK; --p)
if ((*p)->pgrp == pgrp) {
if (sig && (err = send_sig(sig, *p, priv)))
// 信号发送失败,返回发送失败的错误码
retval = err;
else
// 信号发送成功
found++;
}
return (found ? 0 : retval); // 只要有一次信号发送成功,就返回 0
}
kill_proc() - 向进程发送信号
int kill_proc(int pid, int sig, int priv)
{
struct task_struct **p;
if (sig < 1 || sig > 32)
return -EINVAL;
for (p = &LAST_TASK; p > &FIRST_TASK; --p)
if ((*p)->pid == pid)
// 发送成功返回 0,发送失败返回出错号
return (sig ? send_sig(sig, *p, priv) : 0);
return (-ESRCH); // 进程不存在
}
sys_kill() - kill 系统调用
可用于向任何进程或进程组发送任何信号,并非只是杀死进程:
- pid 是进程号
- pid > 0 : 信号发送给 pid 进程
- pid = 0 : 信号发送给当前进程的进程组中的所有进程
- pid = -1 : 信号发送给除 init 进程意外的所有进程
- pid < -1 : 信号发送给进程组 -pid 的所有进程
- sig 是要发送的信号
- sig = 0 则不发送信号,但仍会进行错误检查
int sys_kill(int pid, int sig)
{
struct task_struct **p = NR_TASKS + task;
int err, retval = 0;
// 当前进程组中的所有进程
if (!pid)
return (kill_pg(current->pid, sig, 0));
// 除 init 进程之外的所有进程
if (pid == -1) {
while (--p > &FIRST_TASK)
if (err = send_sig(sig, *p, 0))
retval = err;
return (retval);
}
// 进程组 -pid 中的所有进程
if (pid < 0)
return (kill_pg(-pid, sig, 0));
// 普通的信号发送
return (kill_proc(pid, sig, 0));
}
is_orphaned_pgrp() - 判断孤儿进程组
两种情况下,当一个进程终止时,可能导致进程组变成孤儿。
- 组外最后一个连接父进程的进程终止
- 最后一个父进程的直接后裔终止
孤儿进程组中的所有进程会与它们的作业控制 shell 断开联系。因此,含有停止状态进程的孤儿进程组需要接收到一个 SIGHUP 信号和一个 SIGCONT 信号,指示它们已经从它们的会话中断开联系:
- SIGHUP 信号将导致进程终止
- SIGCONT 信号使进程继续运行
// 判断进程组是否是孤儿进程
// 如果不是则返回 0,如果是则返回 1
int is_orphaned_pgrp(int pgrp)
{
struct task_struct **p;
for (p = &LAST_TASK; p > &FRIST_TASK; --p) {
if (!(*p) || // 空槽
((*p)->pgrp != pgrp) || // 不是指定进程组的成员
((*p)->state == TASK_ZOMBIE) || // 已经处于僵死状态
((*p)->p_pptr->pid == 1)) // 父进程是 init 进程
continue; // 跳过
if (((*p)->p_pptr->pgrp != pgrp) && // 父进程不属于进程组
((*p)->p_pptr->session == (*p)->session)) // 属于同一个会话
return 0; // 肯定不是孤儿
}
return (1); // 否则,一定是孤儿进程组
}
这一段没看懂 😥
has_stopped_jobs() - 判断进程组中是否含有处于停止状态的作业
static int has_stopped_jobs(int pgrp)
{
struct task_struct **p;
for (p = &LAST_TASK; p > &FIRST_TASK; --p) {
if ((*p)->pgrp != pgrp)
continue;
if ((*p)->state == TASK_STOPPED)
return (1);
}
return (0);
}
do_exit() - 程序退出处理函数
被 exit() 系统调用处理函数调用。根据当前进程自身的特性进行处理,将当前进程的状态设置为僵死状态。调用调度函数执行其它进程,不再返回。
volatile void do_exit(long code)
{
struct task_struct *p;
int i;
// 释放当前进程代码段和数据段所占内存页
free_page_tables(get_base(current->ldt[1]), get_limit(0x0f)); // 代码段
free_page_tables(get_base(current->ldt[2]), get_limit(0x17)); // 数据段
// 关闭进程打开的所有文件
for (i = 0; i < NR_OPEN; i++)
if (current->filp[i])
sys_close(i);
// inode 以及库文件的同步操作
iput(current->pwd);
current->pwd = NULL;
iput(current->root);
current->root = NULL;
iput(current->executable);
current->executable = NULL;
iput(current->library);
current->library = NULL;
// 设置进程状态
current->state = TASK_ZOMBIE;
current->exit_code = code;
// 检查当前进程的退出,是否会造成任何进程组变成孤儿进程组
// 如果有,且有处于停止状态的进程,则发送 SIGHUP 和 SIGCONT 信号
// 情况 1 - 父进程在另一个进程组中,本进程是进程组与外界唯一的联系
// 所以进程组将变成一个孤儿进程组
if ((current->p_pptr->pgrp != current->pgrp) &&
(current->p_pptr->session == current->session) &&
is_orphaned_pgrp(current->pgrp) &&
has_stopped_jobs(current->pgrp)) {
kill_pg(current->pgrp, SIGHUP, 1);
kill_pg(current->pgrp, ISGCONT, 1);
}
// 通知父进程当前进程将要终止
current->p_pptr->signal |= (1 << (SIGCHLD-1));
// 处理当前进程所有的子进程
// 让 init 进程集成当前进程的所有子进程
if (p = current->p_cptr) {
while (1) {
p->p_pptr = task[1];
if (p->state == TASK_ZOMBIE)
// 向 init 进程发送 SIGCHLD
task[1]->signal |= (1 << (SIGCHLD-1));
// 情况 2 - 当前进程和子进程在不同的进程组中
// 本进程是它们与外界的唯一链接
// 子进程所在的进程组将变成孤儿进程组
if ((p->pgrp != current->pgrp) &&
(p->session == current->session) &&
is_orphaned_pgrp(p->pgrp) &&
has_stopped_jobs(p->pgrp)) {
kill_pg(p->pgrp, SIGHUP, 1);
kill_pg(p->pgrp, SIGCONT, 1);
}
if (p->p_osptr) {
p = p->p_osptr;
continue; // 处理下一个子进程
}
// 最老的子进程
p->p_osptr = task[1]->p_cptr; // 链接到 task 1 的最新子进程
task[1]->p_cptr->p_ysptr = p; // task 1 的原最新子进程反链接
task[1]->p_cptr = current->p_cptr; // task 1 的最新子进程
current->p_cptr = 0; // 本进程的子进程置空
break;
}
}
// 当前进程是会话首领进程
// 如果有控制终端,则应当向使用控制终端的进程组发送挂断信号 SIGHUP 并释放终端
// 扫描任务数组,将属于当前进程会话的进程终端置空
if (current->leader) {
struct task_sturct **p;
struct tty_struct *tty;
if (current->tty >= 0) {
tty = TTY_TABLE(current->tty);
if (tty->pgrp > 0)
kill_pg(tty->pgrp, SIGHUP, 1);
tty->pgrp = 0;
tty->session = 0;
}
for (p = &LAST_TASK; p > &FIRST_TASK; --p)
if ((*p)->session == current->session)
(*p)->tty = -1;
}
// 当前进程使用过协处理器
if (last_task_used_math == current)
last_task_used_math = NULL;
#ifdef DEBUG_PROC_TREE
audit_ptree();
#endif
schedule();
}
系统调用 exit()
// 系统调用 exit()
// error_code 是用户程序提供的退出状态信息,只有低字节有效
// 被左移 8 位,低字节中将用来保存 wait() 的状态信息
int sys_exit(int error_code)
{
do_exit((error_code & 0xff) << 8);
}
系统调用 waitpid()
挂起当前进程,直到以下情况发生:
- pid 指定的子进程退出
- 收到要求终止该进程的信号
- 需要调用一个信号句柄
若 pid 所指进程早已僵死,则本系统调用立刻返回,并释放子进程占用的资源
- pid > 0:等待进程号为 pid 的子进程
- pid = 0:等待进程组号 == 当前进程组号的任何子进程
- pid < -1:等待进程组号等于 -pid 的任何子进程
- pid = -1:等待任何子进程
选项:
- WUNTRACED:如果子进程是停止的,也马上返回
- WNOHANG:如果没有子进程退出或终止,就马上返回
int sys_waitpid(pid_t pid, unsigned long * stat_addr, int options)
{
int flag;
struct task_struct *p;
unsigned long oldblocked;
verify_area(stat_addr, 4); // 验证存放状态信息的内存空间是否足够
repeat:
flag = 0;
for (p = current->p_cptr; p; p = p->p_osptr) {
if (pid > 0) {
if (p->pid != pid)
// 当前进程的其它子进程,跳过
continue;
} else if (!pid) {
if (p->pgrp != current->pgrp)
// pid == 0
// 该进程的进程组和当前进程组不同,跳过
continue;
} else if (pid != -1) {
if (p->pgrp != -pid)
// pid < -1
// 该进程的进程组号不为 -pid
continue;
}
// pid == -1
// pid > 0 && p->pid == pid
// pid == 0 && p->pgrp == current->pgrp
// pid == -1 && p->pgrp == -pid
// 此时,p 已经指向选择到的一个进程
switch (p->state) {
case TASK_STOPPED:
// 子进程已停止
if (!(options & WUNTRACED) || !p->exit_code)
continue;
put_fs_long((p->exit_code << 8) | 0x7f, stat_addr);
p->exit_code = 0;
return p->pid;
case TASK_ZOMBIE:
// 子进程已僵死
// 累计时间
current->cutime += p->utime;
current->cstime += p->stime;
flag = p->pid;
// 放置退出码
put_fs_long(p->exit_code, stat_addr);
// 释放子进程
release(p);
return flag;
default:
// 既不停止,也不僵死
// 找到过一个符合要求的子进程,但其处于运行态或睡眠态
flag = 1;
continue;
}
}
if (flag) {
// 存在符合等待要求的子进程,但没有处于退出或僵死状态
if (options & WNOHANG)
// 选项 - 如果没有子进程处于退出或终止状态,就立刻返回
return 0;
// 把当前进程置为可中断等待状态
// 保留并修改当前进程的信号屏蔽 bitmap,允许接收 SIGCHLD
// 调度
current->state = TASK_INTERRUPTIBLE;
oldblocked = current->blocked;
current->blocked &= ~(1 << (SIGCHLD-1));
schedule();
current->blocked = oldblocked;
if (currrent->signal & ~(current->blokced | (1 << (SIGCHLD-1))))
// 接收到其它未屏蔽信号,返回 - 重新启动系统调用
return -ERESTARTSYS;
else
goto repeat;
}
// flag == 0,没有找到符合要求的子进程
return -ECHILD; // 子进程不存在
}