Chapter 8.6 - sched.c 程序
Created by : Mr Dk.
2019 / 08 / 18 11:50
Ningbo, Zhejiang, China
8.6 sched.c 程序
8.6.1 功能描述
内核中有关任务 (进程) 调度管理的程序,包含:
- 几个有关调度的基本函数
- 一些简单的系统调用
- 系统时钟中断的定时函数和软盘驱动器定时程序
8.6.1.1 调度函数
调度函数 schedule() 负责选择系统中下一个要运行的任务。首先,对所有任务进行检测,唤醒任何一个已经得到信号的任务:
- 检查报警器定时值 alarm,如果已经过时,就在信号位图中设置
SIGALRM信号,清除 alarm - 如果进程的信号位图中,除去被阻塞的信号外还有其它信号,并处于可中断睡眠状态
TASK_RUNNING,则置任务为就绪状态TASK_RUNNING
随后是调度的核心部分。根据进程的 时间片 和 优先级,选择随后要执行的任务。并利用 switch_to() 切换到该任务。若所有就绪态任务的时间片都为 0,则根据任务的优先级重新设置每个任务的运行时间片。再次重新检查所有任务的时间片,并进行选择。
8.6.1.2 睡眠和唤醒函数
sleep_on() 函数的主要功能:当一个进程所请求的资源 正被占用 或 不在内存,则暂时将该进程切换出去,放在等待队列中等待一段时间。
函数涉及三个任务指针的操作:
*p:等待队列头指针- 文件系统中
i_wait指针 - 内存缓冲中
buffer_wait指针 - ...
- 文件系统中
tmp:存储在当前任务的内核态堆栈上,指向前一个正在等待的任务current:当前任务指针
sleep_on() 函数使 *p 指向当前任务,使当前任务的 tmp 指针指向 *p 原来指向的正在等待的任务。当几个进程为了等待同一资源而分别调用 sleep_on() 时,构筑出了一个等待队列:
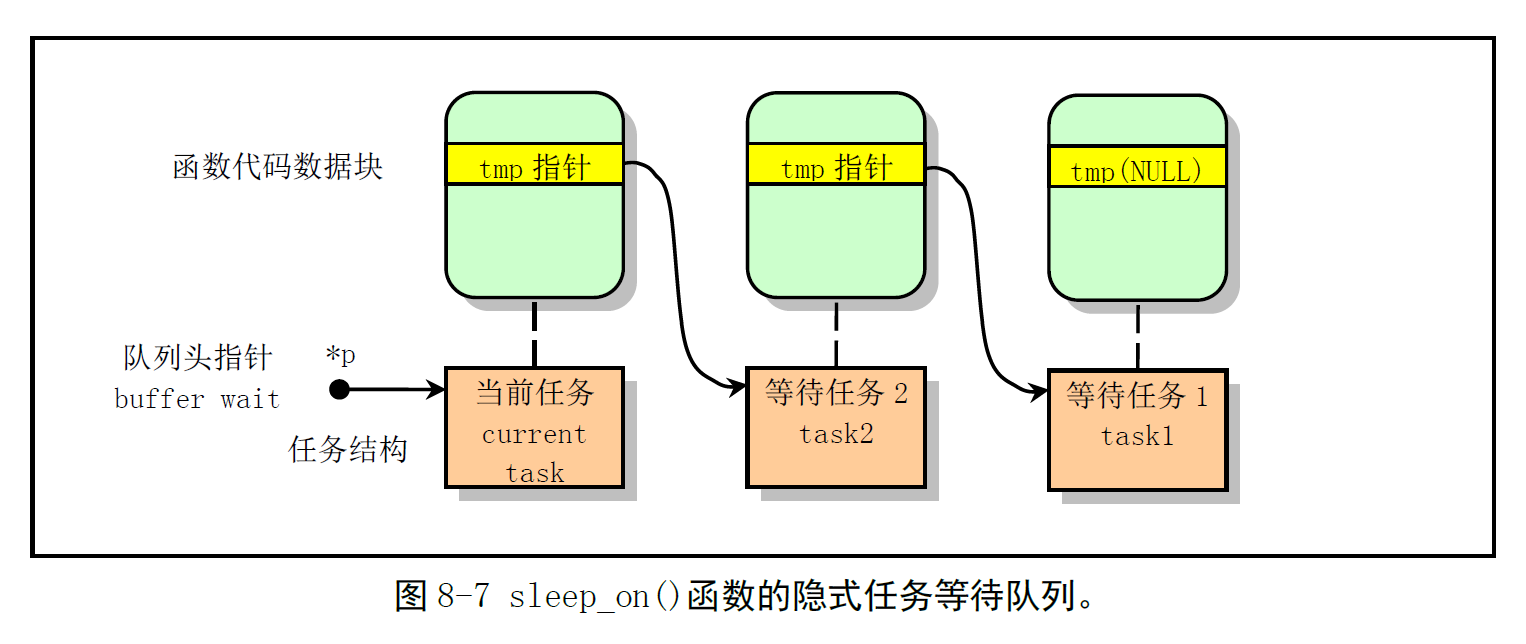
这队列很奇怪 因为它好像不是 FIFO 的.. 😥,更像一个链式栈。
*p指向队尾 (栈顶)。后面看代码可以得知,这个数据结构是 FILO 的。
将进程插入队列后,sleep_on() 函数就会调用 schedule() 函数去执行别的进程。当进程被唤醒时,就会把比它更早进入队列的进程唤醒。唤醒函数 wake_up() 用于把等待可用资源的指定任务置位就绪状态。
sleep_on() 还有一种形式 - interruptible_sleep_on() 函数
- 调度其它任务前,将当前任务置为 可中断等待状态
- 在本任务被唤醒后,还需要判断队列上是否有后来的任务;若有,则需要先调度它们
- Linux 0.12 中,这两种情况都由
sleep_on()实现,用任务的状态作为参数区分这两种情况
8.6.2 代码注释
进程调度和信号处理之间联系较多,所以我觉得要结合
sys_call.s和signal.c一块儿看,才能加强理解。
信号操作宏
首先定义了两个宏,用于快速操作信号。信号的编号是从 1 开始,到 32 为止;但信号在 bitmap 中是从第 0 位到第 31 位,所以要注意这个转变。
// 取编号为 nr 的信号在 bitmap 中的对应数值
#define _S(nr) (1 << ((nr)-1))
// 除 SIGKILL 和 SIGSTOP 信号以外,其它信号是可以被阻塞的
#define _BLOCKABLE (~(_S(SIGKILL) | _S(SIGSTOP)))
关于信号和阻塞的一点理解:内核通过在进程 PCB 中设置信号位来给进程发送信号,如果进程处于可中断睡眠状态,则设置信号位后唤醒进程;如果进程处于不可中断睡眠状态,则只设置信号位。进程处理信号的时机在其从内核态返回用户态时:
- 收到信号后进程退出
- 进程忽略信号
- 捕捉某类信号 - 调用对应的信号处理函数
一种可能的思路:向进程发送某个信号后,会将该信号的阻塞位置位;进程处理完该信号后,将该阻塞位复位。如果进程处理信号期间,又来了同样的信号,那么会被阻塞位给屏蔽掉,即丢弃 (所谓的不可靠信号)。可靠的信号处理形式:排队记录,那么就不存在丢弃的问题。
OK,看代码,一开始是内核调试函数。
显示各任务的详细信息
void show_task(int nr, struct task_struct * p)
{
int i, j = 4096-sizeof(struct task_struct); // 内核栈最大容量
// PCB 和内核态堆栈共占一页物理内存
printk("%d: pid=%d, state=%d, father=%d, child=%d, ",
nr, p->pid, p->state, p->p_pptr->pid,
p->p_cptr ? p->p_cptr->pid : -1);
i = 0;
while (i < j && !((char *)(p+1))[i])
i++; // 检测指定任务数据结构以后等于 0 的字节数 (大约)
// 即,内核态堆栈空闲字节数
printk("%d/%d chars free in kstack\n\r", i, j);
printk(" PC=%08X.", *(1019 + (unsigned long *) p));
if (p->p_ysptr || p->p_osptr)
printk(" Younger sib=%d, older sib=%d\n\r",
p->p_ysptr ? p->p_ysptr->pid : -1,
p->p_osptr ? p->p_osptr->pid : -1);
else
printk("\n\r");
}
void show_state(void)
{
int i;
printk("\rTask-info:\n\r");
for (i = 0; i < NR_TASKS; i++) // NR_TASKS 为内核支持的最多任务数
if (task[i]) // 任务指针不为空 (任务存在)
show_task(i, task[i]);
}
数据结构定义
union task_union {
struct task_struct task;
char stack[PAGE_SIZE];
};
// ???
// union 大一上 C 语言课的时候一笔带过
// 有空再弄明白这具体是个啥
// 任务 0 初始化
static union task_union init_task = { INIT_TASK, };
// 初始化系统滴答
// volatile 和编译器有关,需要有空弄弄明白
// 系统滴答 10ms 一次,是系统时钟单位
unsigned long volatile jiffies = 0;
// 开机时间
unsigned long startup_time = 0;
// 为调整时钟而需要增加的滴答数
int jiffies_offset = 0;
// 当前任务指针,指向任务 0
struct task_struct *current = &(init_task.task);
// 上一个使用协处理器的任务指针
struct task_struct *last_task_used_math = NULL;
// 定义任务指针数组,第一项被初始化为任务 0
struct task_struct *task[NR_TASKS] = { &(init_task.task), };
// 任务 0 的用户态堆栈
// 1K 项,共 4KB
long user_stack[ PAGE_SIZE >> 2 ];
// SS:ESP
// SS 的段选择符为内核数据段选择符 0x10
// ESP 是逆向入栈的 (地址递减),因此初始地址指向 user_stack 的最后一项
struct {
long *a;
short b;
} stack_start = { & user_stack [ PAGE_SIZE >> 2 ], 0x10 };
接下来是一个子函数,用于在任务被调度切换之后,保存原任务的协处理器状态,恢复新任务的协处理器状态。
void math_state_restore()
{
if (last_task_used_math == current)
{
return; // 任务没变,直接返回
}
__asm__("fwait"); // 发送协处理器指令之前要先发 WAIT 指令
if (last_task_used_math)
{
__asm__("fnsave %0"::"m" (last_task_used_math->tss.i387));
}
last_task_used_math = current; // 指向当前任务
if (current->used_math) { // 当前任务使用过协处理器
__asm__("frstor %0"::"m" (current->tss.i387)); // 恢复协处理器状态
} else { // 首次使用协处理器
__asm__("fninit"::); // 初始化协处理器
current->used_math = 1; // 设置已使用协处理器标志
}
}
调度函数 schedule()
下面是最核心的 schedule() 函数 (会被很多地方调用到!):
- 调度进程
- 处理信号
void schedule(void)
{
int i, next, c;
struct task_struct **p;
// 首先检测各进程的定时器
// 唤醒已得到信号的可中断任务
for (p = &LAST_TASK; p > &FIRST_TASK; --p)
if (*p) {
if ((*p)->timeout && (*p)->timeout < jiffies) {
// 已设置定时器 && 已经超时
(*p)->timeout = 0; // 复位定时器
if ((*p)->state == TASK_INTERRUPTIBLE)
(*p)->state = TASK_RUNNING;
}
if ((*p)->alarm && (*p)->alarm < jiffies) {
// 已设置 SIGALRM 信号 && 已经超时
(*p)->signal |= (1 << (SIGALRM-1)); // 置 SIGALRM 信号
(*p)->alarm = 0;
}
if (((*p)->signal & ~(_BLOCKALBE & (*p)->blocked)) &&
(*p)->state == TASK_INTERRUPTIBLE})
// 信号 bitmap 中存在除被阻塞的信号外还有信号存在
// 且任务处于可中断等待状态
(*p)->state = TASK_RUNNING;
}
// 调度程序的主要部分
while (1) {
c = -1; // 数值最大的时间片
next = 0; // 下一个要调度的任务
i = NR_TASKS; // 任务 index
p = &task[NR_TASKS]; // 最后一个任务项
// 从最后一个任务开始循环
while (--i) {
if (!&--p)
continue; // 跳过空槽
if ((*p)->state == TASK_RUNNING && (*p)->counter > c)
c = (*p)->counter, next = i;
}
// 有大于 0 的时间片,则跳出循环,将任务切换到 next
// 或没有一个可运行任务 (c == -1, next == 0),则跳出循环,切换到任务 0
if (c) break;
// 所有进程的时间片都为 0
// 根据优先级重新计算 counter
// counter = counter/2 + priority
for (p = &LAST_TASK; p > &FIRST_TASK; --p)
if (*p)
(*p)->counter = ((*p)->counter >> 1) + (*p)->priority;
}
switch_to(next); // 任务切换宏
}
接下来的各种函数中全部都使用了该 schedule() 函数。
系统调用 pause()
- 将当前任务设定为可中断等待状态,并重新调度
- (还没有完全实现?)
int sys_pause(void)
{
current->state = TASK_INTERRUPTIBLE;
schedule();
return 0;
}
睡眠函数 sleep_on()
- 将当前任务置为 可中断睡眠状态 或 不可中断睡眠状态
- 将等待队列头指针指向当前任务
- 参数
state可以为TASK_UNINTERRUPTIBLE或TASK_INTERRUPTIBLE- 不可中断睡眠状态需要利用
wake_up()函数明确唤醒 - 可中断睡眠状态可以通过信号、任务超时等手段唤醒
- 不可中断睡眠状态需要利用
static inline void __sleep_on(struct task_struct **p, int state)
{
struct task_struct *tmp;
if (!p) // 指针所指对象可以为 NULL,但指针本身不会为 0
return;
if (current == &(init_task.task))
panic("task[0] trying to sleep");
// 插入等待队列
tmp = *p;
*p = current;
current->state = state;
repeat:
schedule(); // 重新调度
// 任务被唤醒后,将从这里继续执行
// 如果等待队列头指针并非指向自己
// 说明之后还有进程进入了等待队列
// 先将队头置为就绪状态,将自身置为不可中断等待状态
// 队列中的进程使用 wake_up() 依次显式唤醒前一个任务
if (*p && *p != current) {
(**p).state = 0;
current->state = TASK_UNINTERRUPTIBLE;
goto repeat;
}
// 此时,任务被真正唤醒,*p == current
if (!*p)
printk("Warning: *P = NULL\n\r");
if (*p = tmp)
// 头指针指向队列中的前一个任务
// 如果该任务存在,则唤醒
// 等待队列头指针最终会变为 NULL
tmp->state = 0;
}
// 上述函数是接下来两个函数的实现函数:
void interruptible_sleep_on(struct task_struct **p)
{
__sleep_on(p, TASK_INTERRUPTIBLE);
}
void sleep_on(struct task_struct **p)
{
__sleep_on(p, TASK_UNINTERRUPTIBLE);
}
唤醒函数 wake_up()
唤醒不可中断等待任务。由于新等待任务插入在等待队列的头指针处,因此唤醒的是最后进入等待队列的任务:
void wake_up(struct task_struct **p)
{
if (p && *p) {
if ((**p).state == TASK_STOPPED)
printk("wake_up: TASK_STOPPED");
if ((**p).state == TASK_ZOMBIE)
printk("wake_up: TASK_ZOMBIE");
(**p).state = 0; // TASK_RUNNING
}
}
内核定时器
#define TIME_REQUESTS 64 // 最多 64 个定时器
static struct timer_list {
long jiffies; // 定时滴答数
void (*fn)(); // 定时处理程序
struct timer_list *next; // 指向下一个定时器
} timer_list[TIME_REQUESTS], * next_timer = NULL; // 定时器队列头指针
void add_timer(long jiffies, void (*fn)(void))
{
struct timer_list *p;
if (!fn) // 处理程序指针为空
return;
cli(); // 关中断
if (jiffies <= 0) // 定时器的值 ≤ 0,则立刻调用处理程序,不加入链表
(fn)();
else {
// 从定时器中找一个空闲项
for (p = timer_list; p < timer_list + TIME_REQUESTS; p++)
if (!p->fn)
break;
if (p >= timer_list + TIME_REQUESTS) // 定时器数组用完
panic("No more time requests free");
p->fn = fn;
p->jiffies = jiffies;
p->next = next_timer;
next_timer = p; // 插入定时器队头
// 链表按定时值从小到大排序
// 排序时减去排在前面的定时器所需要的滴答数
// 处理定时器时,只需要查看表头的定时器是否到期
while (p->next && p->next->jiffies < p->jiffies) {
p->jiffies -= p->next->jiffies;
fn = p->fn;
p->fn = p->next->fn;
p->next->fn = fn;
jiffies = p->jiffies;
p->jiffies = p->next->jiffies;
p->next->jiffies = jiffies;
p = p->next;
}
}
sti(); // 开中断
}
时钟中断处理函数
。由 sys_call.s 中的 _timer_interrupt 调用。调用时,会将当前 CPU 的 CPL 压入堆栈,作为函数参数,表示中断发生时,CPU 正在执行用户代码还是内核代码。执行计时更新操作,以及任务切换。
void do_timer(long cpl)
{
// 黑屏操作
static int blanked = 0;
if (blankcount || !blankinterval) {
if (blanked)
unblank_screen();
if (blankcount)
blankcount--;
blanked = 0;
} else if (!blanked) {
blank_screen();
blanked = 1;
}
// 硬盘操作超时
if (hd_timeout)
if (!--hd_timeout)
hd_times_out();
// 扬声器
if (beepcount)
if (!--beepcount)
sysbeepstop();
// 如果当前代码运行在内核态,则递增 stime
// 如果当前代码运行在用户态,则递增 utime
if (cpl) // cpl == 3
current->utime++;
else
current->stime++;
// 如果设置了内核定时器,则将第一个定时器的值 -1
// 如果已经到时,则调用相应处理程序,并移除定时器
if (next_timer) {
next_timer->jiffies--;
while (next_timer && next_timer->jiffies <= 0) {
void (*fn)(void);
fn = next_timer->fn;
next_timer->fn = NULL;
next_timer = next_timer->next; // 删除队头
(fn)(); // 调用定时处理函数
}
}
// 软盘
if (current_DOR & 0xf0)
do_floppy_timer();
// 当前进程时间片还没用完,继续执行
if ((--current->counter) > 0)
return;
current->counter = 0;
if (!cpl) // 内核态程序,不依赖 counter 进行调度
return;
schedule();
}
与进程相关的几个系统调用
// 设定新定时时间,并返回原定时时间的剩余值
// alarm 的时间单位是系统滴答,所以设计滴答和秒的单位转换
int sys_alarm(long seconds)
{
int old = current->alarm;
if (old)
old = (old-jiffies) / HZ; // 剩余时间
current->alarm = (seconds > 0) ? (jiffies + HZ * seconds) : 0;
return (old);
}
// 取当前进程号 pid
int sys_getpid(void)
{
return current->pid;
}
// 取父进程号 ppid
int sys_getppid(void)
{
return current->p_pptr->pid;
}
// 取用户号 uid
int sys_getuid(void)
{
return current->uid;
}
// 取有效用户号 euid
int sys_geteuid(void)
{
return current->euid;
}
// 取组号 gid
int sys_getgit(void)
{
return current->gid;
}
// 取有效的组号 egid
int sys_getegit(void)
{
return current->egid;
}
// 降低对 CPU 的使用权
int sys_nice(long increment)
{
if (current->priority - increment > 0) // 防止优先权增大
current->priority -= increment;
return 0;
}
内核调度初始化程序
void sched_init(void)
{
int i;
struct desc_struct *p; // 描述符表
// 兼容 POSIX 标准,并无实际意义
if (sizeof(struct sigaction) != 16)
panic("Struct sigaction MUST be 16 bytes");
// 在 GDT 中设置 Task 0 的 TSS 和 LDT
// FIRST_TSS_ENTRY == 4
// FIRST_LDT_ENTRY == 5
// gdt 是一个描述符表数组
set_tss_desc(gdt+FIRST_TSS_ENTRY, &(init_task.task.tss));
set_ldt_desc(gdt+FIRST_LDT_ENTRY, &(init_task.task.ldt));
// 初始化任务数组和描述符表项
p = gdt + FIRST_TSS_ENTRY + 2; // 指向 GDT 第六项
for (i = 1; i < NR_TASKS; i++) { // 跳过了 Task 0
task[i] = NULL;
p->a = p->b = 0;
p++;
p->a = p->b = 0;
p++;
}
// 复位 NT 标志
__asm__("pushfl; andl $0xffffbfff, (%esp); popfl");
// 加载 Task 0 的 TSS 和 LDT
// 只手动加载这一次,之后新任务的 LDT 由 CPU 根据 TSS 中的 LDT 项自动加载
ltr(0);
lldt(0);
// 初始化 8253 定时器
// 通道 0,工作方式 3
// 输出引脚接在 8259 主芯片的 IRQ0 上
// 10ms 发出一次 IRQ0 请求
outb_p(0x36, 0x43);
outb_p(LATCH & 0xff, 0x40);
outb(LATCH >> 8, 0x40);
// 设置时钟中断门,修改中断控制器屏蔽码,允许时钟中断
// 设置系统调用中断门
set_intr_gate(0x20, &timer_interrupt);
outb(inb_p(0x21) & ~0x01, 0x21);
set_system_gate(0x80, &system_call);
}